Исследования динамики зубчато-рычажных механизмов на основе эллиптических колес
В машинах автоматического и полуавтоматического действия широко используются механизмы, которые в течение рабочего цикла позволяют получать остановку выходного звена при непрерывном движении входного звена. К таким механизмам относятся храповые, мальтийские, зубчатые с неполным числом зубьев, а также зубчато-рычажные механизмы.
В храповых механизмах движение ведомому звену сообщает собачка, зацепляющаяся с ним при движении в одном направлении и выходящая из зацепления при движении в обратном направлении. Главный недостаток храповых механизмов заключается в том, что имеют место в начале и конце фазы движения удары ([1] стр. 326).
Значительно большее распространение по сравнению с храповыми получили мальтийские механизмы из-за более благоприятных кинематических характеристик и надежного обеспечения заданного времени покоя. Выходное звено мальтийского механизма выполняется в виде диска или стола, на котором расположено несколько пазов. В паз может входить палец, расположенный на ведущем кривошипе. К недостаткам мальтийских механизмов относят наличие ударов в начале движения ([2] стр. 177).
В зубчатых механизмах с неполным числом зубьев вращение ведомого звена, имеющего зубья по всей окружности, будет происходить в пределах некоторого угла, соответствующего зацеплению его с ведущим зубчатым колесом, имеющим зубья не на всей окружности. Недостатком зубчатых механизмов с неполным числом зубьев является наличие удара в моменты начала зацепления ([3] стр. 414).
Главным недостатком вышеперечисленных механизмов является разрыв кинематической цепи на время остановки с последующим ее замыканием на время движения, что приводит к жестким ударам, вследствие чего возникают большие динамические нагрузки на детали механизма, приводящие к их быстрому износу и поломкам.
От разрыва кинематической цепи избавлены зубчато-рычажные механизмы, которые образованы из механизмов с низшими кинематическими парами путем добавления двух или более зубчатых колес, причем, по крайней мере, одно из них движется вместе с шатуном.
Исследования зубчато-рычажных механизмов на основе круглых зубчатых колес показали их ограниченные кинематические возможности.
Анализ зубчато-рычажных механизмов показал, что существует возможность расширить их кинематические возможности, т. е. увеличить продолжительность выстоя ведомого звена за счет замены в таких механизмах круглых зубчатых колес на эллиптические.

Рис. 1 Зубчато-рычажный механизм на основе эллиптических колес
В данной работе были исследованы 50000 наборов параметров зубчато-рычажных механизмов на основе эллиптических колес и были выбраны два набора параметров с наибольшими примерно равными выстоями. На рисунке 2 представлена зависимость угла поворота выходного звена 8 (φ8) от угла поворота входного звена 1 (φ1), полученная аналитическим расчетом на ЭВМ, для этих двух зубчато-рычажных механизмов на основе эллиптических колес, обеспечивающих максимальный выстой в сравнении с зубчато-рычажным механизмом, обеспечивающим максимальный выстой, но на основе круглых колес.
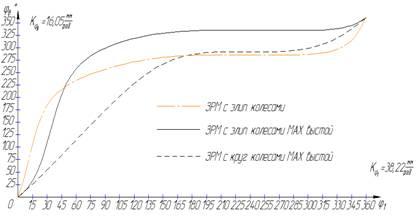
Рис. 2 График зависимости угла поворота выходного звена от угла поворота входного звена исследуемых механизмов
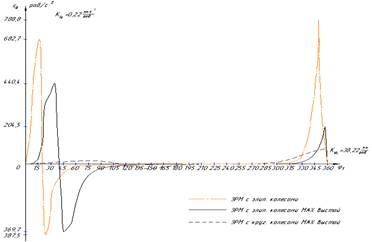
Путем графического дифференцирования были получены графики зависимости угловой скорости выходного звена 8 (ω8) от угла поворота входного звена 1 (φ1) рисунок 3.
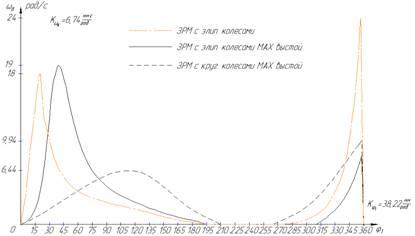
Рис. 3 График зависимости угловой скорости выходного звена от угла поворота входного звена исследуемых механизмов
Снова используя метод графического дифференцирования были получены графики зависимости углового ускорения выходного звена 8 (ε8) от угла поворота входного звена 1 (φ1) рисунок 4.