Устройство управления сервоприводом на базе таймера КР1006ВИ1
(2) t2 = 0.693 R2 C
Именно такое время на выходе остается напряжение низкого уровня.
Соответственно период колебаний является суммой t2 + t1, частота соответственно определяется по формуле
(3) f = 1.44 / ((R1 + 2 R2) C),
а скважность выходного определяется выражением
(4) D = R2 / (R1 + 2 R2)
Отсюда видно, что в колебательном режиме скважность не может быть меньше 50% (а реально колебания прекращаются раньше при уменьшении R1). Для формирования меандра существует специальная схема, где R2 отсутствует вообще, а в цепь разряда (вывод 7) включен дополнительный резистор.
Вывод очевиден - управляющий сигнал для сервопривода со скважностью в 5-10% получить в такой схеме не удается. А вот скважности порядка 90-95% получить легко. Отсюда напрашивается разумный вывод - выходной сигнал нужно проинвертировать, прежде чем подавать на сервопривод. В схеме управления всегда найдется "лишний" логический инвертор или незадействованный элемент И-НЕ. При этом схема тестера существенно упрощается - рис.3.
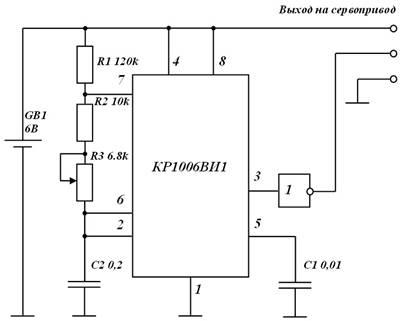
Рис. 3. Схема включения таймера для управления сервоприводом.
Частота колебаний достаточно стабильна за счет того, что R1 (= R1 на схеме) на порядок больше, чем R2 (=R2+R3 на схеме) в (3).
список литературы
1. Трейстер Р. Радиолюбительские схемы на ИС типа 555: Пер. с англ. — М.: Мир, 1988. — 263 с., ил.