Управление шаговым двигателем револьверной головоки токарного автомата
В настоящее время ведется работа по модернизации станка С40. Целью является модернизация привода станка С40 и включение его в СNС систему станка.
Общий вид двигателя изображен на рисунке 1.

Рис.1 Электродвигатель шаговый ШД-5Д1МУ3
В предлагаемом материале описана несложная разработка, позволяющая управлять шаговым двигателем, подключенным к LPT порту IBM-совместимого компьютера.
Параллельный порт является великолепным интерфейсом, позволяющим подключать к персональному компьютеру множество самых различных устройств. Однако он может быть легко поврежден, поэтому при его использовании для подсоединения внешних устройств нужно быть очень внимательным.
Параллельный порт имеет несколько линий ввода/вывода, которые могут быть разделены на две группы — линии передачи данных и линии сигналов управления. Линии передачи данных — двунаправленные (разумеется, речь идет о режимах ЕСР/ЕРР), и именно их мы и будем использовать.
Далее необходимо убедится, что двигатель исправен. Простейший способ это сделать — замкнуть все выводы двигателя между собой и попробовать повернуть его вал. Вал должен проворачиваться с трудом, по сравнению с тем, как он проворачивается при разомкнутых выводах. Также с помощью тестера можно проверить целостность обмоток двигателя.
При разработке шаговых двигателей (ШД), а также систем управления ими, зачастую требуется перебрать множество различных вариантов многофазных последовательностей импульсов, подаваемых на обмотки двигателя. Построение системы управления (СУ) на дискретных элементах при этом становится трудоемким процессом. Поэтому решено было сделать наиболее простую систему управления Ниже на рисунке 2 приведена электрическая принципиальная схема:
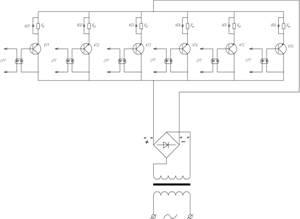
Рис.2. Схема электрическая принципиальная.
Двигатель имеет 12 обмоток. Все обмотки соединены друг с другом и имеют общий вывод. Порядок подключения представлен в таблице 1.
| Левое вращение |
| Правое вращение | |||||||||||||||||||||||||
| Такты коммутации | |||||||||||||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| ||||||||||||||||||||